Publications
2026

2025
-
 Distributionally Robust and Risk-Averse Model Predictive Control for Motion Planning and Control: Reformulations and Computational IssuesIn Nonlinear and Constrained Control: Applications, Synergies, Challenges and Opportunities, 2025
Distributionally Robust and Risk-Averse Model Predictive Control for Motion Planning and Control: Reformulations and Computational IssuesIn Nonlinear and Constrained Control: Applications, Synergies, Challenges and Opportunities, 2025 -
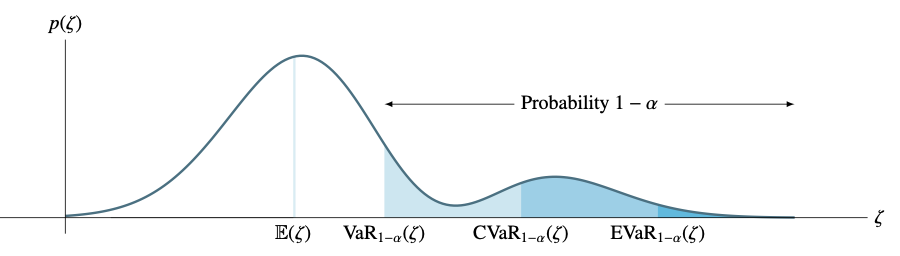
 Risk-aware robotics: Tail risk measures in planning, control, and verification [focus on education]IEEE Control Systems, 2025
Risk-aware robotics: Tail risk measures in planning, control, and verification [focus on education]IEEE Control Systems, 2025
2024
-
 Sample-based bounds for coherent risk measures: Applications to policy synthesis and verificationArtificial Intelligence, 2024
Sample-based bounds for coherent risk measures: Applications to policy synthesis and verificationArtificial Intelligence, 2024 -
 An addendum to nebula: Toward extending team costar’s solution to larger scale environmentsIEEE Transactions on Field Robotics, 2024
An addendum to nebula: Toward extending team costar’s solution to larger scale environmentsIEEE Transactions on Field Robotics, 2024 -
 Explore until confident: Efficient exploration for embodied question answeringIn Robotics: Science and Systems, 2024
Explore until confident: Efficient exploration for embodied question answeringIn Robotics: Science and Systems, 2024 -
 Perceive with confidence: Statistical safety assurances for navigation with learning-based perceptionThe International Journal of Robotics Research, 2024
Perceive with confidence: Statistical safety assurances for navigation with learning-based perceptionThe International Journal of Robotics Research, 2024 -
 Step: Stochastic traversability evaluation and planning for risk-aware navigation; results from the darpa subterranean challengeField Robotics, 2024
Step: Stochastic traversability evaluation and planning for risk-aware navigation; results from the darpa subterranean challengeField Robotics, 2024
2023
-
 Risk-averse receding horizon motion planning for obstacle avoidance using coherent risk measuresArtificial Intelligence, 2023
Risk-averse receding horizon motion planning for obstacle avoidance using coherent risk measuresArtificial Intelligence, 2023 -
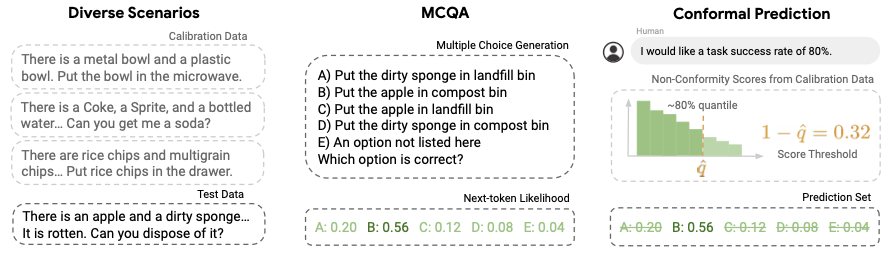 Robots that ask for help: Uncertainty alignment for large language model plannersIn Conference on Robot Learning (CoRL), 2023
Robots that ask for help: Uncertainty alignment for large language model plannersIn Conference on Robot Learning (CoRL), 2023 -
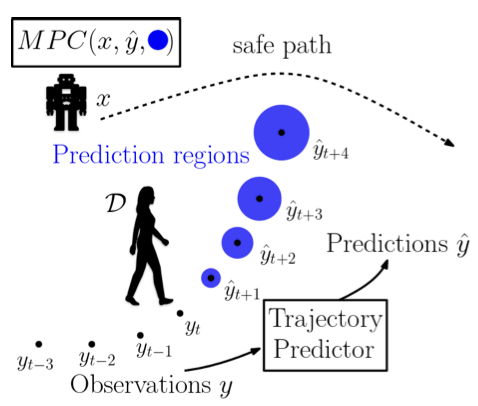 Adaptive conformal prediction for motion planning among dynamic agentsIn Learning for Dynamics and Control Conference, 2023
Adaptive conformal prediction for motion planning among dynamic agentsIn Learning for Dynamics and Control Conference, 2023
2022
- Prepare: Predictive proprioception for agile failure event detection in robotic exploration of extreme terrainsIn 2022 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2022
- NeBula: TEAM CoSTAR’s robotic autonomy solution that won phase II of DARPA subterranean challengeField robotics, 2022
- Distributionally robust model predictive control with total variation distanceIEEE Control Systems Letters, 2022
- Moving obstacle avoidance: A data-driven risk-aware approachIEEE Control Systems Letters, 2022
2021
- Risk-averse stochastic shortest path planningIn 2021 60th IEEE Conference on Decision and Control (CDC), 2021
- Risk-sensitive motion planning using entropic value-at-riskIn 2021 European control conference (ECC), 2021
2020
- The Kinematics of Tracked Vehicles via the Power Dissipation Method2020